Authors: Weize Zhang, Mohammed Elmahgiubi, Kasra Rezaee, Behzad Khamidehi, Hamidreza Mirkhani, Fazel Arasteh, Chunlin Li, Muhammad Ahsan Kaleem, Eduardo R. Corral-Soto, Dhruv Sharma, Tongtong Cao
Published on: May 03, 2024
Impact Score: 7.6
Arxiv code: Arxiv:2405.01394
Summary
- What is new: The application of language-assisted perception models in conjunction with Inverse Reinforcement Learning (IRL) for the motion planner in an autonomous driving context.
- Why this is important: Improving the reliability and performance of autonomous driving systems in challenging traffic scenarios.
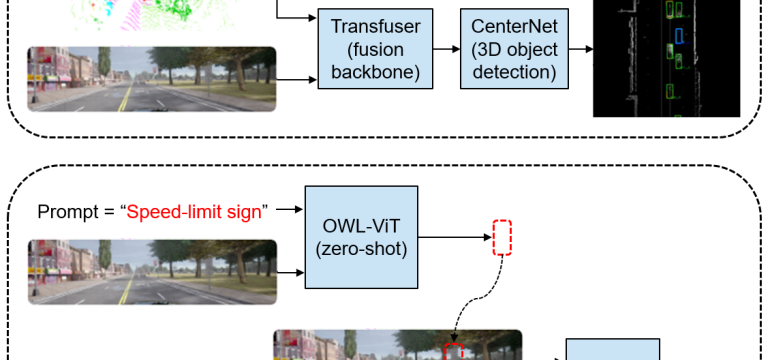
- What the research proposes: A modular architecture consisting of five main components (sensing, localization, perception, tracking/prediction, and planning/control) enhanced by language-assisted perception models and IRL.
- Results: Achieved first place in the CARLA Leaderboard 2.0 Autonomous Driving challenge 2023, demonstrating the effectiveness of the proposed solution.
Technical Details
Technological frameworks used: Modular architecture with components for sensing, localization, perception, tracking/prediction, and planning/control.
Models used: Language-assisted perception models, Inverse Reinforcement Learning (IRL).
Data used: Open-source driving datasets.
Potential Impact
Automotive industries, particularly companies focused on the development of autonomous driving technologies; ADAS (Advanced Driver-Assistance Systems) vendors; navigation and mapping services.
Want to implement this idea in a business?
We have generated a startup concept here: MapGear.


Leave a Reply