Authors: Michael Kösel, Marcel Schreiber, Michael Ulrich, Claudius Gläser, Klaus Dietmayer
Published on: April 24, 2024
Impact Score: 7.2
Arxiv code: Arxiv:2404.15879
Summary
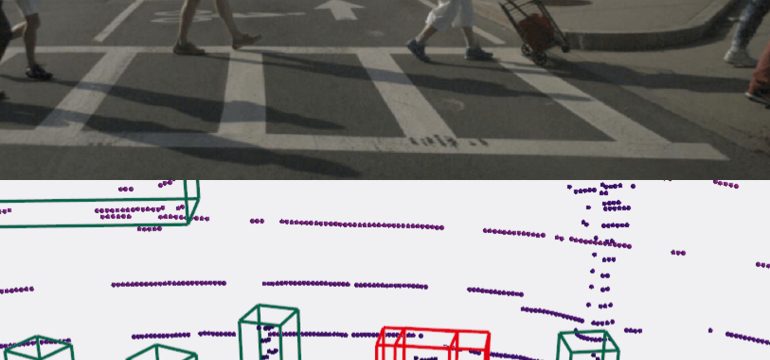
- What is new: Addressing the challenge of detecting out-of-distribution (OOD) objects in LiDAR-based 3D object detection by generating synthetic training data.
- Why this is important: LiDAR-based object detectors struggle with unknown foreground objects not present in their training data, leading to potential safety risks.
- What the research proposes: Generating synthetic OOD objects and using a pre-trained object detector with an MLP to differentiate between ID and OOD objects.
- Results: Successfully validated the method on the nuScenes OOD benchmark, showing improved detection of OOD objects in 3D.
Technical Details
Technological frameworks used: Pre-trained object detector, synthetic data generation
Models used: Multilayer Perceptron (MLP)
Data used: nuScenes dataset
Potential Impact
Automotive companies and autonomous driving technology providers; could impact safety feature development in autonomous vehicles.
Want to implement this idea in a business?
We have generated a startup concept here: LidarGuard.


Leave a Reply