Authors: Jilan Samiuddin, Benoit Boulet, Di Wu
Published on: April 18, 2024
Impact Score: 7.2
Arxiv code: Arxiv:2404.12256
Summary
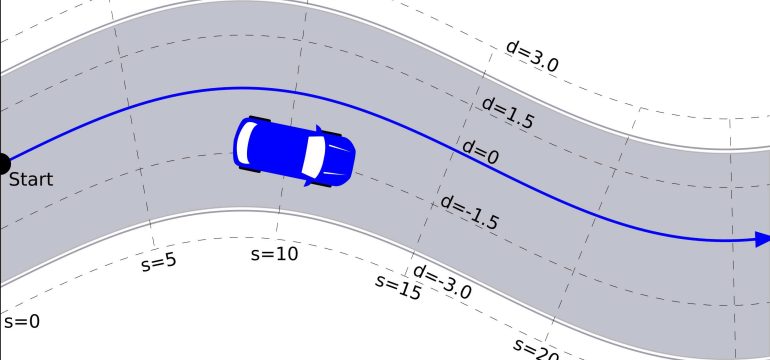
- What is new: A novel online spatial-temporal graph trajectory planner is introduced for autonomous driving, which incorporates a new potential function for network training.
- Why this is important: The need for safer, more comfortable, and efficient trajectory planning in autonomous vehicles.
- What the research proposes: Developing an online spatial-temporal graph trajectory planner supported by a sequential network for generating safe and comfortable trajectories, including a behavioral layer for kinematic constraints.
- Results: The planner successfully generated safe and feasible trajectories, showing improved or comparable performance in safety and comfort compared to traditional methods.
Technical Details
Technological frameworks used: Spatial-temporal graph construction, sequential network processing
Models used: Online spatial-temporal graph trajectory planner, sequential network, potential function based training
Data used: Data from autonomous vehicle, surrounding vehicles, and virtual road nodes
Potential Impact
Autonomous driving industry, automotive manufacturers, AI technology companies specializing in autonomous systems
Want to implement this idea in a business?
We have generated a startup concept here: Pathfinder AV.


Leave a Reply