Authors: Lars Ullrich, Alex McMaster, Knut Graichen
Published on: April 12, 2024
Impact Score: 7.0
Arxiv code: Arxiv:2404.08271
Summary
- What is new: A study on transfer learning techniques using transformer-based models for trajectory planning in autonomous driving, focusing on adapting from simulation to real-world conditions.
- Why this is important: The challenge of adapting autonomous driving systems from simulations to real-world conditions, considering vehicle and country-specific differences such as sensor systems, traffic laws, and perception algorithms.
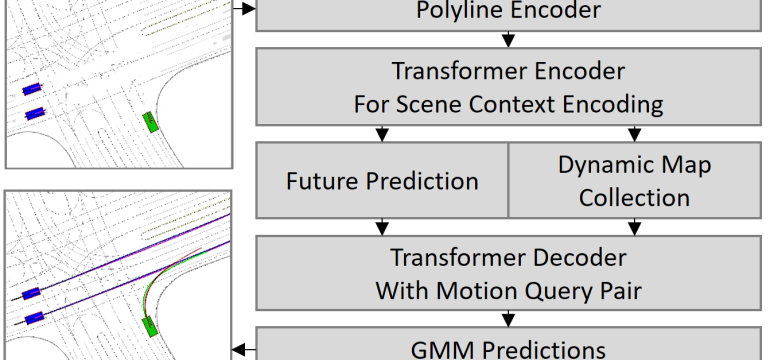
- What the research proposes: A simulation-based study investigating transfer learning techniques using a transformer-based architecture to address the adaptation needs of autonomous driving systems.
- Results: Insights into the trade-offs between computational time and performance, guiding effective model adaptations from simulation environments to real-world applications.
Technical Details
Technological frameworks used: Transformer-based architecture
Models used: Transfer learning techniques
Data used: Simulation data and real-world conditions adaptations
Potential Impact
Automotive industry, particularly companies focusing on autonomous driving technologies and their integration into real-world traffic systems.
Want to implement this idea in a business?
We have generated a startup concept here: DriveMind.


Leave a Reply