Authors: Weisheng Xu, Sifan Zhou, Zhihang Yuan
Published on: April 11, 2024
Impact Score: 7.8
Arxiv code: Arxiv:2404.07495
Summary
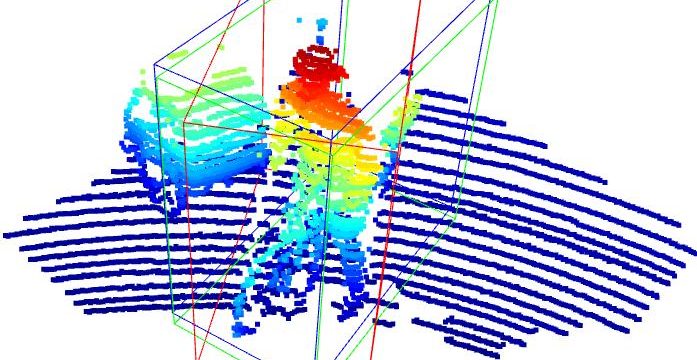
- What is new: PillarTrack introduces a pillar-based framework for 3D Single Object Tracking (SOT) that transforms point clouds into dense pillars, incorporates a Pyramid-type Encoding Pillar Feature Encoder, and utilizes a Transformer-based backbone for improved performance.
- Why this is important: Existing 3D SOT methods often rely on point-based pipelines, causing information redundancy or loss and resulting in suboptimal tracking performance.
- What the research proposes: The PillarTrack framework transforms sparse point clouds into dense pillars to better preserve geometric details and utilizes a new feature encoding and Transformer-based backbone for better tracking accuracy.
- Results: PillarTrack achieved state-of-the-art performance on the KITTI and nuScenes datasets while enabling real-time tracking speed.
Technical Details
Technological frameworks used: PillarTrack, PE-PFE, Transformer-based backbone
Models used: nan
Data used: KITTI, nuScenes datasets
Potential Impact
Autonomous driving companies, robotics manufacturers, and companies involved in 3D mapping and surveillance could benefit or need to adapt to the advancements presented by PillarTrack.
Want to implement this idea in a business?
We have generated a startup concept here: PillarSense.


Leave a Reply