Authors: Yunlong Wang, Lei Zhang, Yuyang Tu, Hui Zhang, Kaixin Bai, Zhaopeng Chen, Jianwei Zhang
Published on: April 05, 2024
Impact Score: 7.4
Arxiv code: Arxiv:2404.04193
Summary
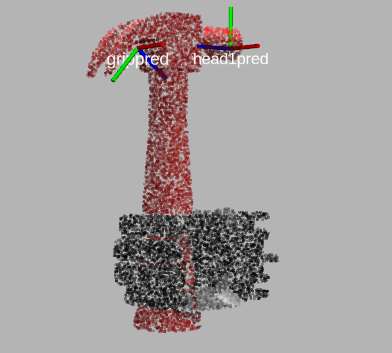
- What is new: Introduction of the TOOLEE dataset and ToolEENet framework for improved 6D pose estimation of tool’s end-effector based on usage.
- Why this is important: Existing systems struggle with accurate tool pose estimation due to occlusion by the hand and the failure of the tool’s overall pose to accurately represent contact interaction.
- What the research proposes: A new dataset (TOOLEE) for affordance segmentation of tool’s EE and a novel framework (ToolEENet) utilizing a diffusion model-based pose estimator for accurate 6D pose estimation.
- Results: Demonstrated high precision and generalization in 6D pose estimation, especially suitable for contact-based manipulation scenarios.
Technical Details
Technological frameworks used: ToolEENet
Models used: Diffusion model-based pose estimator, Symmetry-aware pose representation
Data used: TOOLEE dataset
Potential Impact
Robotics, automation industries, and companies focused on robotic manipulation and precision tasks.
Want to implement this idea in a business?
We have generated a startup concept here: PrecisionBot.


Leave a Reply