Authors: Lanpei Li, Enrico Donato, Vincenzo Lomonaco, Egidio Falotico
Published on: April 05, 2024
Impact Score: 7.4
Arxiv code: Arxiv:2404.04219
Summary
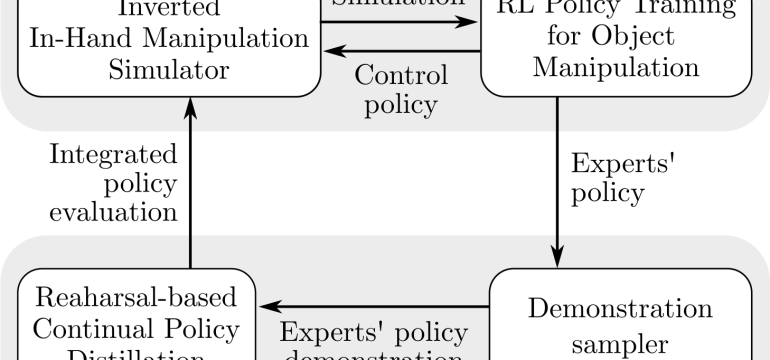
- What is new: Introduces Continual Policy Distillation (CPD) framework for versatile control of multi-fingered soft robotic hands.
- Why this is important: Existing control developments for soft robotic hands lack adaptability and generalizability for different objects.
- What the research proposes: CPD framework uses Policy Distillation with exemplar-based rehearsal methods to create adaptive and generalized control policies.
- Results: Achieved versatile and adaptive behaviors in four-fingered soft gripper across various objects, outperforming existing replay strategies.
Technical Details
Technological frameworks used: Continual Policy Distillation (CPD)
Models used: Policy Distillation (PD), expert policy networks, student policy network
Data used: Object manipulation tasks with different shapes and sizes
Potential Impact
Robotics, automation, manufacturing companies; particularly those specializing in logistics, warehousing, and assembly line automation.
Want to implement this idea in a business?
We have generated a startup concept here: FlexiGripAI.

Leave a Reply