Authors: Chihiro Noguchi, Toshiaki Ohgushi, Masao Yamanaka
Published on: March 27, 2024
Impact Score: 7.0
Arxiv code: Arxiv:2403.18207
Summary
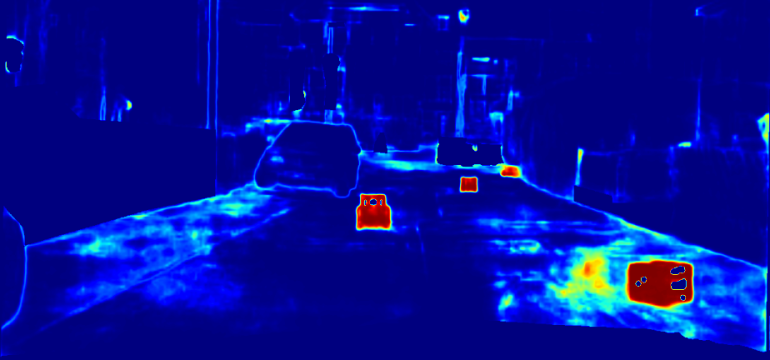
- What is new: A novel anomaly score called the unknown objectness score, which integrates anomaly scores with objectness scores.
- Why this is important: Standard object-detection methods fail to identify unknown obstacles not included under predefined categories in autonomous driving.
- What the research proposes: A semantic-segmentation network with a sigmoid head that provides both pixel-wise anomaly and objectness scores to detect unknown traffic obstacles.
- Results: The proposed unknown objectness score method surpasses state-of-the-art methods in identifying unknown objects in driving scenes.
Technical Details
Technological frameworks used: Semantic-segmentation network
Models used: Sigmoid head for pixel-wise scoring
Data used: Publicly available datasets
Potential Impact
Automotive industry, particularly companies developing autonomous driving technologies.
Want to implement this idea in a business?
We have generated a startup concept here: RoadGuard AI.


Leave a Reply