Authors: Yinke Dong, Haifeng Yuan, Hongkun Liu, Wei Jing, Fangzhen Li, Hongmin Liu, Bin Fan
Published on: March 25, 2024
Impact Score: 7.4
Arxiv code: Arxiv:2403.16374
Summary
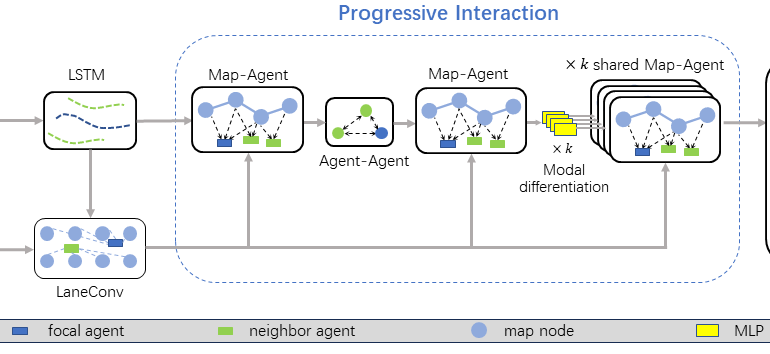
- What is new: Introduction of a progressive interaction network for motion prediction, with a unique focus on enabling the agent’s features to progressively interact with relevant maps.
- Why this is important: Current methods struggle to accurately predict the motion of agents like pedestrians and cyclists for autonomous driving due to limitations in capturing map information and social interactions.
- What the research proposes: A progressive interaction network supported by graph convolutions and a novel weight allocation mechanism for multi-modal training.
- Results: Superior performance in accurately predicting agents’ motions over existing one-stage interaction methods, as evidenced by results on challenging benchmarks.
Technical Details
Technological frameworks used: Progressive interaction network with graph convolutions
Models used: Historical trajectory encoder, social interaction, and multi-modal differentiation models
Data used: Map information, agent movements
Potential Impact
Autonomous driving sector, potentially affecting companies like Tesla, Waymo, Uber, and any entity involved in smart city technologies.
Want to implement this idea in a business?
We have generated a startup concept here: PathPredictAI.


Leave a Reply