Authors: Christian Lenz, Rohit Menon, Michael Schreiber, Melvin Paul Jacob, Sven Behnke, Maren Bennewitz
Published on: March 22, 2024
Impact Score: 7.8
Arxiv code: Arxiv:2403.15306
Summary
- What is new: Introduces HortiBot, a novel three-armed robotic system designed for automating horticultural tasks like pruning and selective harvesting in greenhouse environments.
- Why this is important: Horticultural tasks are labor-intensive, and skilled workers are scarce. The variability and delicacy of greenhouse environments add complexity to task automation.
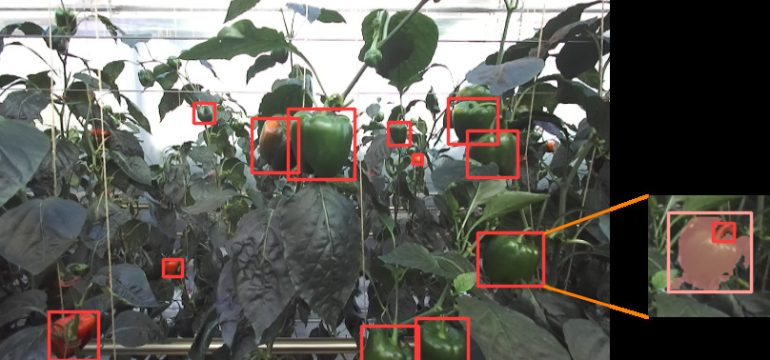
- What the research proposes: The HortiBot system utilizes a three-armed approach, including two for manipulation (grasping and cutting) and one for active perception with stereo cameras, equipped with a system that can detect peppers and their stems in real-time and perform tasks with high precision.
- Results: In lab experiments, HortiBot demonstrated high success rates in selective harvesting tasks, thanks to its integrated perception and manipulation capabilities.
Technical Details
Technological frameworks used: Online data association framework for real-time world modeling, collision-aware trajectory generation for safe manipulation.
Models used: Use of stereo cameras for active perception, end-effector force torque sensing for compliant manipulation.
Data used: Real-time environmental and plant structure data collected via stereo cameras.
Potential Impact
Agricultural technology firms, indoor farming startups, companies specializing in greenhouse automation and robotics.
Want to implement this idea in a business?
We have generated a startup concept here: GreenHarvest Tech.


Leave a Reply