Authors: Nassim Belmecheri, Arnaud Gotlieb, Nadjib Lazaar, Helge Spieker
Published on: January 29, 2024
Impact Score: 7.4
Arxiv code: Arxiv:2403.09668
Summary
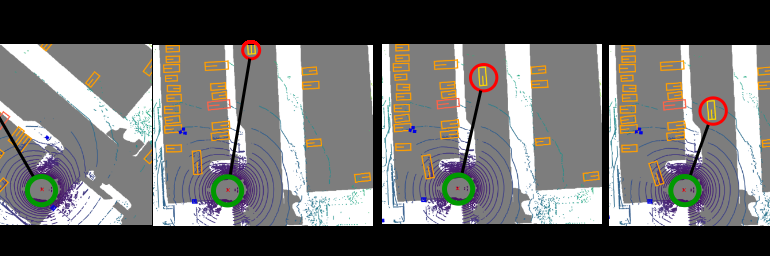
- What is new: The introduction of the Qualitative Explainable Graph (QXG) for urban mobility scene understanding, which combines symbolic and qualitative data representation.
- Why this is important: The challenge of interpreting complex urban scenes in real-time for automated vehicles using existing sensor data.
- What the research proposes: QXG leverages spatio-temporal graphs and qualitative constraints to synthesize scene semantics from raw sensor inputs, enabling real-time, intelligible scene models for automated vehicles.
- Results: QXG demonstrates the ability to incrementally construct detailed and explainable scene understandings in real-time, aiding in decision-making and providing clear explanations for vehicle actions.
Technical Details
Technological frameworks used: Spatio-temporal graph analysis, Qualitative constraints representation
Models used: Machine learning models for sensor data interpretation
Data used: LiDAR, camera data
Potential Impact
Automotive industry, specifically companies involved in automated driving technologies, and urban mobility service providers.
Want to implement this idea in a business?
We have generated a startup concept here: SceneIQ.

Leave a Reply