Authors: Chen Liu, Shibo He, Haoyu Liu, Jiming Chen
Published on: March 14, 2024
Impact Score: 7.4
Arxiv code: Arxiv:2403.09190
Summary
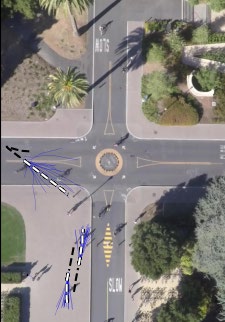
- What is new: Proposal of an Intention-aware denoising Diffusion Model (IDM) for trajectory prediction, achieving state-of-the-art results with a significant reduction in inference time.
- Why this is important: Existing generative models for trajectory prediction in autonomous driving face limited representation ability and unstable training.
- What the research proposes: Utilizing a diffusion model with decoupled intention and action uncertainties, leading to more efficient and accurate trajectory predictions.
- Results: Achieved an FDE of 13.83 pixels on SDD dataset and 0.36 meters on ETH/UCY dataset, with inference time reduced by two-thirds compared to the original diffusion model.
Technical Details
Technological frameworks used: Intention-aware denoising Diffusion Model (IDM)
Models used: Dependent diffusion processes for intention and action uncertainties.
Data used: Stanford Drone Dataset (SDD) and ETH/UCY dataset
Potential Impact
Autonomous driving and collision avoidance systems, potentially impacting companies in automotive and tech industries.
Want to implement this idea in a business?
We have generated a startup concept here: DriveIntend.


Leave a Reply