Authors: Samuel Sze, Lars Kunze
Published on: March 13, 2024
Impact Score: 7.2
Arxiv code: Arxiv:2403.08748
Summary
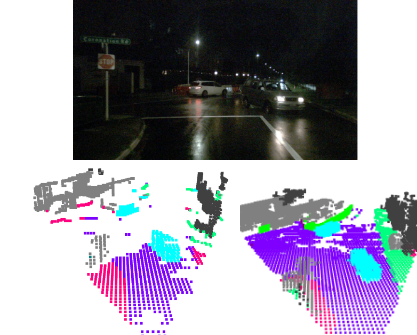
- What is new: A new approach using sparse convolution networks for 3D semantic occupancy prediction in autonomous vehicles, demonstrating competitive accuracy with lower computational demands.
- Why this is important: Existing 3D mapping methods for autonomous vehicles are computationally demanding, making real-time applications challenging.
- What the research proposes: Utilizing a sparse convolution network (Minkowski Engine) to efficiently predict 3D semantic occupancy from 2D camera images and LiDAR scans.
- Results: The approach shows competitive accuracy on the nuScenes dataset while being suitable for real-time applications.
Technical Details
Technological frameworks used: Minkowski Engine
Models used: Sparse Convolution Network for 3D semantic occupancy prediction
Data used: 2D camera images and LiDAR scans
Potential Impact
Automotive companies and autonomous vehicle technology providers could benefit from these insights, particularly those currently investing in real-time 3D mapping capabilities.
Want to implement this idea in a business?
We have generated a startup concept here: MapMind.


Leave a Reply