Authors: Ji Zhang, Yiran Ding
Published on: March 08, 2024
Impact Score: 7.2
Arxiv code: Arxiv:2403.05329
Summary
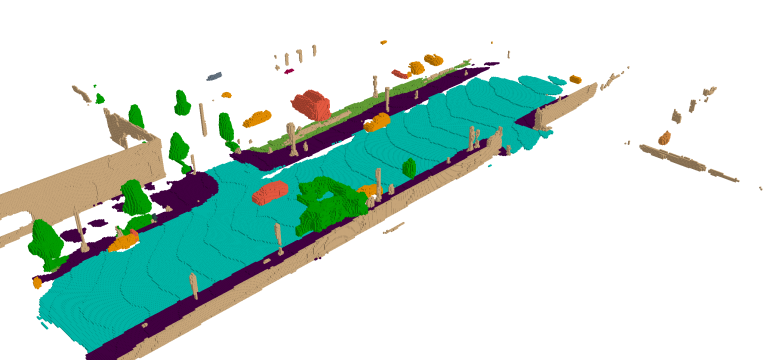
- What is new: Introduces OccFusion, a new multi-modal fusion method that avoids traditional depth estimation for 3D occupancy predictions, alongside a novel point cloud sampling algorithm and active training methods.
- Why this is important: Existing fusion-based 3D occupancy prediction methods rely on depth estimation, which is an ill-posed problem and demands high computational resources.
- What the research proposes: OccFusion uses a multi-modal fusion approach without depth estimation and an active training method for efficient and accurate occupancy predictions.
- Results: Achieves higher IoU scores across all categories in the OpenOccupancy benchmark, surpassing state-of-the-art methods and requiring less computational resources for training and inference.
Technical Details
Technological frameworks used: OccFusion, Active Training
Models used: Multi-modal fusion models, Point cloud sampling algorithm
Data used: OpenOccupancy benchmark
Potential Impact
Autonomous driving systems, companies specializing in 3D mapping and scene understanding technologies
Want to implement this idea in a business?
We have generated a startup concept here: FusionDriveTech.

Leave a Reply