Authors: Riccardo Pieroni, Simone Specchia, Matteo Corno, Sergio Matteo Savaresi
Published on: March 06, 2024
Impact Score: 7.4
Arxiv code: Arxiv:2403.04112
Summary
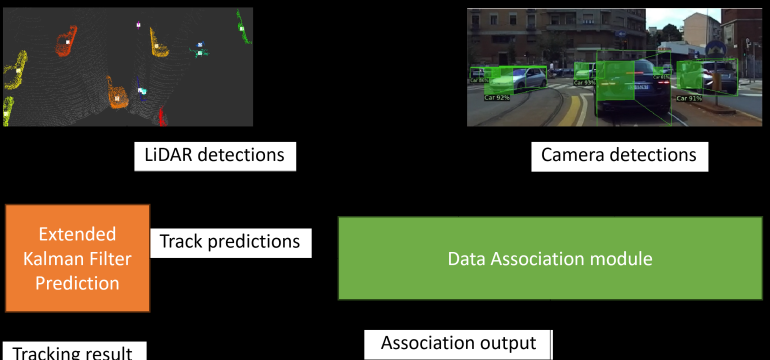
- What is new: The local-based, map-agnostic multi-modal MOT approach combining camera and LiDAR data without requiring global pose information.
- Why this is important: Improving Multi-Object Tracking for self-driving cars by effectively incorporating both camera and LiDAR data.
- What the research proposes: A novel algorithm that uses a 3D object detector for camera data, classical clustering for LiDAR data, a three-step association process, and an Extended Kalman filter for motion estimation.
- Results: The algorithm demonstrated satisfactory results in both simulation and real-world data tests.
Technical Details
Technological frameworks used: Three-step association process, Extended Kalman filter
Models used: 3D object detector
Data used: Camera frames, LiDAR observations
Potential Impact
Automotive industry, particularly companies working on self-driving technology, and sensor manufacturers.
Want to implement this idea in a business?
We have generated a startup concept here: DriveAI.


Leave a Reply