Authors: Meredith L. Anderson, Ran Jing, Juan C. Pacheco Garcia, Ilyoung Yang, Sarah Alizadeh-Shabdiz, Charles DeLorey, Andrew P. Sabelhaus
Published on: February 09, 2024
Impact Score: 8.07
Arxiv code: Arxiv:2402.06201
Summary
- What is new: The introduction of a fatigue testing protocol combined with a supervisory control system specifically for maintaining consistent SMA forces in soft robots.
- Why this is important: The limitation in scaling up soft robots due to challenges in soft actuator forces and design constraints.
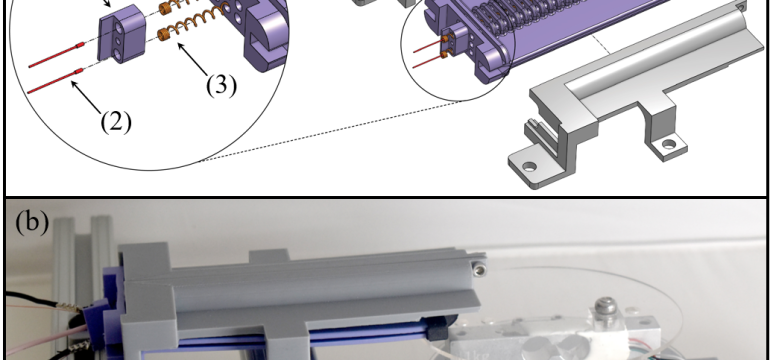
- What the research proposes: A design featuring swappable SMA muscles within a soft limb, managed by invariance-based control systems for optimizing their temperature and force output.
- Results: Demonstrated ability to maintain high forces in practical tasks over hundreds of cycles with the proposed system, improving the feasibility of using SMA muscles in soft robots.
Technical Details
Technological frameworks used: Invariance-based control system, fatigue testing protocol
Models used: Electrothermal SMA artificial muscles
Data used: Force measurement data from blocked-force tests at varying temperatures and lifetimes
Potential Impact
Robotics manufacturers focusing on soft robotics, healthcare industry for rehabilitation devices, and any sector requiring adaptable automation solutions.
Want to implement this idea in a business?
We have generated a startup concept here: FlexiForce.

Leave a Reply