Authors: Brian Yang, Huangyuan Su, Nikolaos Gkanatsios, Tsung-Wei Ke, Ayush Jain, Jeff Schneider, Katerina Fragkiadaki
Published on: February 09, 2024
Impact Score: 8.52
Arxiv code: Arxiv:2402.06559
Summary
- What is new: Introduces DiffusionES, a novel method that optimizes black-box non-differentiable objectives by combining gradient-free optimization with trajectory denoising, surpassing state-of-the-art performance in autonomous driving benchmarks.
- Why this is important: Existing trajectory optimization methods require a differentiable reward function, limiting applicability for optimizing non-differentiable objectives.
- What the research proposes: DiffusionES, which iteratively samples and mutates trajectories using a diffusion model and a black-box reward function to efficiently explore the solution space.
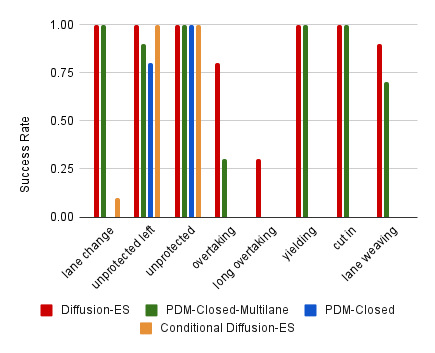
- Results: Achieves superior performance on the nuPlan autonomous driving benchmark. Demonstrates ability to generate complex behaviors like aggressive lane weaving, not present in training data.
Technical Details
Technological frameworks used: Combines evolutionary search with a truncated diffusion process for trajectory optimization.
Models used: Uses diffusion models for sampling trajectories and a black-box reward function for scoring.
Data used: nuPlan benchmark for autonomous driving.
Potential Impact
Autonomous driving technology companies, automotive manufacturers, and AI solution providers in mobility.
Want to implement this idea in a business?
We have generated a startup concept here: OptiDriveAI.

Leave a Reply