Authors: Adam Joshua Hung, Challen Enninful Adu, Talia Y. Moore
Published on: February 06, 2024
Impact Score: 8.07
Arxiv code: Arxiv:2402.04374
Summary
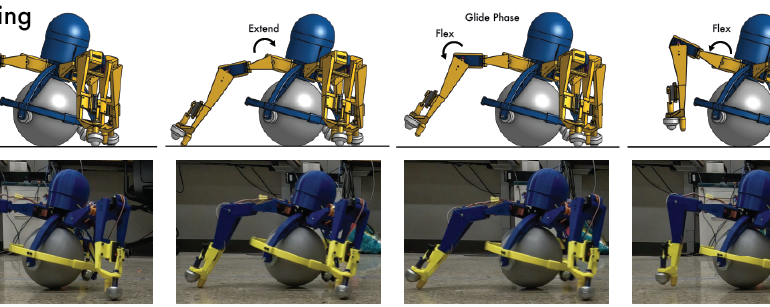
- What is new: The introduction of a novel tripedal robot design, SKOOTR, featuring frictional and rolling contacts with a freely rotating central sphere for enhanced stability and versatility.
- Why this is important: Existing tripedal robots have limitations in their turning ability, efficiency, and stability due to their design, constraining their locomotion capabilities.
- What the research proposes: The SKOOTR robot leverages a unique design with both frictional and rolling contacts, plus a rotating sphere, to achieve more stable and versatile locomotion, including turning, climbing, and obstacle traversal.
- Results: SKOOTR demonstrates superior versatility and stability with capabilities for multiple forward gaits, turning maneuvers, obstacle traversal, and stair climbing, all at a low construction cost.
Technical Details
Technological frameworks used: nan
Models used: nan
Data used: nan
Potential Impact
Robotics manufacturers and industries relying on autonomous robots for logistics, exploration, and service tasks could benefit or face disruption from SKOOTR’s advancements.
Want to implement this idea in a business?
We have generated a startup concept here: OmniNavigate Robotics.

Leave a Reply