Authors: Moritz Harmel, Anubhav Paras, Andreas Pasternak, Gary Linscott
Published on: December 23, 2023
Impact Score: 8.45
Arxiv code: Arxiv:2312.15122
Summary
- What is new: Large-scale reinforcement learning experiments for autonomous driving that significantly outperform existing machine learning policies.
- Why this is important: Running reinforcement learning experiments for autonomous driving at necessary scales is difficult due to safety, scalability, and data collection issues.
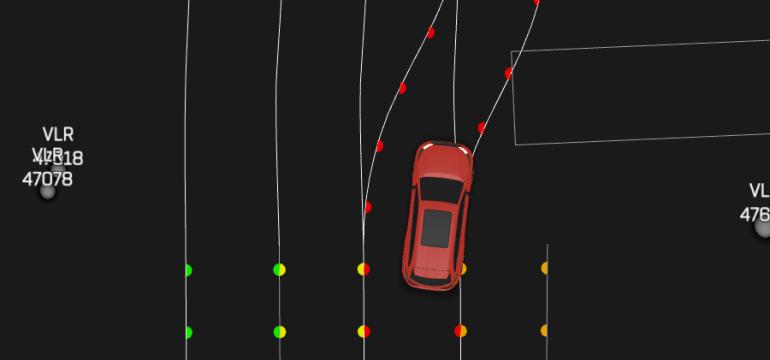
- What the research proposes: An efficient and realistic driving simulator that leverages a large amount of real-world driving data.
- Results: The policy performance improves with scale, achieving a 64% reduction in failure rate and a 25% increase in driving progress rate compared to current state-of-the-art.
Technical Details
Technological frameworks used: Reinforcement learning, distributed computing.
Models used: Custom reinforcement learning models for autonomous driving.
Data used: Real-world driving data.
Potential Impact
Autonomous driving companies, automotive industry, driving simulation software market.
Want to implement this idea in a business?
We have generated a startup concept here: SimuDriveAI.

Leave a Reply