Authors: Haicheng Liao, Shangqian Liu, Yongkang Li, Zhenning Li, Chengyue Wang, Bonan Wang, Yanchen Guan, Chengzhong Xu
Published on: February 06, 2024
Impact Score: 8.45
Arxiv code: Arxiv:2402.04318
Summary
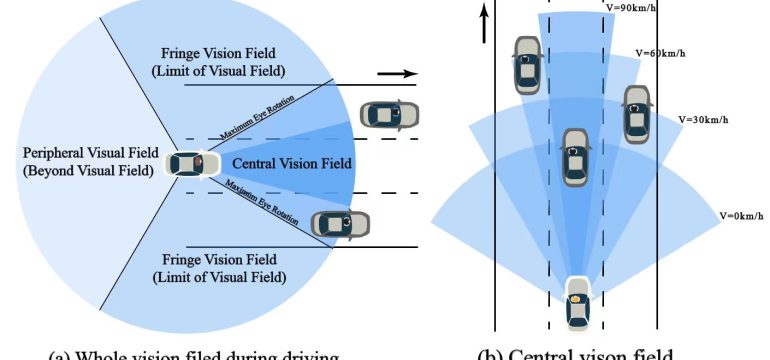
- What is new: Introduction of an ‘adaptive visual sector’ mimicking human attention allocation and a ‘dynamic traffic graph’ for trajectory prediction in AVs.
- Why this is important: Autonomous vehicles face challenges in trajectory prediction in mixed autonomy environments.
- What the research proposes: An interdisciplinary model that integrates human cognition principles with Convolutional Neural Networks (CNN) and Graph Attention Networks (GAT).
- Results: Model outperforms existing baselines by at least 15.2%, 19.4%, and 12.0% on NGSIM, HighD, and MoCAD datasets, respectively.
Technical Details
Technological frameworks used: CNN, GAT
Models used: GAVA model
Data used: NGSIM, HighD, MoCAD datasets
Potential Impact
Automotive and technology companies developing autonomous vehicle solutions could greatly benefit or face disruption.
Want to implement this idea in a business?
We have generated a startup concept here: CogniPath.


Leave a Reply