Authors: Clément Lhoste, Emek Barış Küçüktabak, Lorenzo Vianello, Lorenzo Amato, Matthew R. Short, Kevin Lynch, Jose L. Pons
Published on: February 06, 2024
Impact Score: 8.3
Arxiv code: Arxiv:2402.04180
Summary
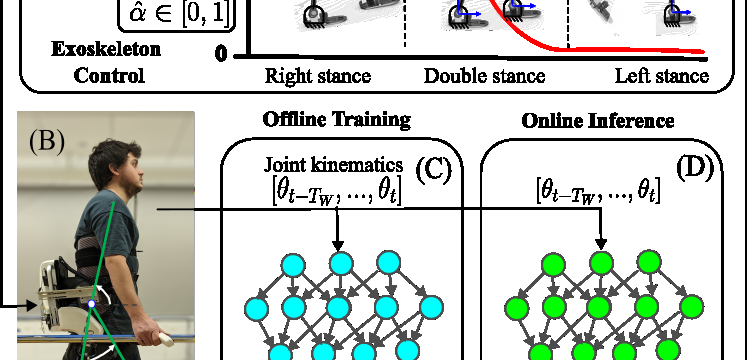
- What is new: A deep-learning approach to predict the weight distribution of an exoskeleton without using force sensors.
- Why this is important: Existing methods for controlling lower-limb exoskeletons require complex and costly setups due to the use of sensors for weight distribution measurement.
- What the research proposes: Using joint kinematics and deep-learning to estimate the weight distribution on lower-limb exoskeletons in real time, reducing complexity and cost.
- Results: The model achieved an R2 of 0.9 for weight distribution prediction with less than 1 ms prediction times and was effective in real-time control for both overground and treadmill walking.
Technical Details
Technological frameworks used: Deep-learning framework not specified
Models used: Model specifics not provided
Data used: Treadmill walking data from six users
Potential Impact
Medical rehabilitation technology, prosthetics and assistive device manufacturers, insurance companies
Want to implement this idea in a business?
We have generated a startup concept here: StrideSmart.

Leave a Reply