Authors: Dimitrious Schreiber, Zhaowei Yu, Taylor Henderson, Derek Chen, Alexander Norbasha, Michael C. Yip
Published on: February 05, 2024
Impact Score: 8.22
Arxiv code: Arxiv:2402.02708
Summary
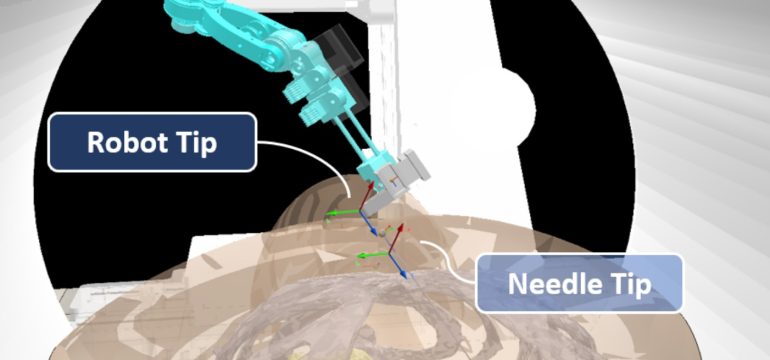
- What is new: CRANE introduces a CT-compatible robotic system designed for enhanced dexterity within the imaging bore, enabling precise needle manipulation with reduced radiation exposure.
- Why this is important: The need for precise, minimally invasive treatment in real-time, despite limitations in manual adjustments and physiological movements, without increasing radiation exposure.
- What the research proposes: The development of CRANE, a robotic arm and needle emplacer designed for use within a CT scanner bore, leveraging automatic planning and control for precise needle manipulation.
- Results: CRANE’s design meets clinically motivated metrics for dexterity and accuracy, proving capable across different human morphologies in in-situ evaluations.
Technical Details
Technological frameworks used: Automatic planning and control framework for intra-bore needle manipulation.
Models used: Redundant linkage model for enhanced dexterity within confined spaces.
Data used: Clinically motivated metrics for evaluating in-bore dexterity and accuracy.
Potential Impact
Healthcare and medical robotics markets, particularly companies involved in surgical robotics and minimally invasive procedures.
Want to implement this idea in a business?
We have generated a startup concept here: PrecisionPoint Robotics.


Leave a Reply